微分という言葉は二重の意味を持つ。一つはなにかを「小さく分割する行為(微分すること)」の意味であり、一つは「小さく分割した部分(微小部分)」を表す。数学では「微分」という言葉を時に応じてこれらの意味に使い分けるが、微小部分を組み合わせて作られる「微分係数(微係数)」や「導関数」もしばしば「微分」とよばれることがある。復習がてら、その一つである「微分係数(導関数)」について簡単に振り返っておくことにする。
の値がわずかな量だけ変わったとき(すなわちの値が
に変わったとき)、関数
は
に変わる。このとき関数がどれだけ変化したかを表す量をの「差分(二つの量の差の意味)」と呼び、それをと書く[1]。
のわずかな変化の間に生じた関数値の平均的な変化はを
で割ったである。そして
を小さく取れば取るほど、この値は点
におけるの平均的変化をより正確に表すことになる。を
に近づけて、点におけるより正確なの平均変化
を得る操作を数学では
<2-1> (2.1.1)
と書き、これを点におけるの「導関数」あるいは、の「微分係数」または「微係数」とよぶ。そして最終的にを得るために行う(2.1.1)式の操作を
「をで微分する」という。なお、(2.1.1)式にあるのダッシュ記号「’」はそれがついた関数を関数の変数で微分して得られる導関数という意味で「ラグランジュの記法」と呼ばれ、導関数(すなわち微分係数)の簡単な表記としてしばしば使われる。
が非常に小さな量であるとしたとき、(2.1.1)式の第二式と第三式から差分
を
<2-2> (2.1.2)
と書くことができる。この量をの「全微分」という。
微分の考え方に慣れていない初学者は(2.1.2)式のような表現で混乱を起こすかもしれないが、もしこれが正しく理解できれば微分の考え方がわかるので、この式をもう少していねいに説明しておく。は
のことであるからが
に近づくともに近づく。したがって(2.1.2)式は左辺も右辺もともに
になり、意味がないように思える。ところが(2.1.2)式右辺の
にかかっているはを
に近づけても一般ににはならない。そのため右辺のになるなり方が左辺の
になるなり方と必ずしも同じではないのである。いわば、右辺の
と左辺ののになる“速さ”が違うと言っても良い。そして微分係数
はその速さの違いを表している。すなわち
の全微分 とは、 をに近づけたときにやはりになるを、を使って与える量である。
全微分は後の節(§5「偏微分」)で関数の「独立変数」を教えてくれる式として再度登場する。
多くの基本的な関数の導関数が種々の数学的手法を使って具体的に求められており、それをもとにしてさらに複雑な関数の導関数が求められる。その詳細は「解析学」の教科書にゆずることにして、ここでは物理学で特に多く現れる関数の導関数を与えておくことにする。以下にいくつかの微分公式と、よく使われる関数の導関数を与えておく。それらを組み合わせると、物理学の学習で必要になる微分に関する全ての計算が実行できるはずである。
と
を
の任意関数、を微分に関係のない定数、に関する微分係数を
のように「’」をつけて表すと、以下の有用な微分公式が成り立つ:
- <2-3>
- <2-4>
- <2-5>
- 【合成関数の微分】 が
の関数であり、が
の関数であるとき、を通しての関数である
を「合成関数」という。「合成関数」は高校の数学で学んだはずであるが、もし忘れていてもここでもう一度学べばよい。
は結局の関数であるから、のに関する導関数が存在する。その導関数は公式<2-6>
によって与えられる。
- に対して、その逆関数をとすれば、逆関数のに関する微分は である。
よく使われる関数の導関数を以下に与える。その証明は数学の時間に学ぶか、あるいは高校の教科書で復習してほしい。
最後から二つ目の式に現れる定数は「ネイピアの定数
()」とよばれる不思議かつ奇妙な性質を持つ数であり、表にあるようには
で微分をしても、なにも変わらない。また、最後の式に現れる関数
は初めて見る記号かもしれないので、少し説明しておく。一般に対数の底は何であってもよい。普通にある対数記号のは底を
とする対数を表し、「常用対数」とよばれる。底を明確に記して
の常用対数を書くとである。ところが、物理に常用対数はそれほど多く現れず、その代わりにネイピアの定数を底とする対数が非常に多く現れる。もちろんそれには十分な理由があり、それは後に微分方程式を学べば理解できる。ネイピアの定数を底とする対数
を「自然対数」と呼び、それを簡単にと書くのである。
関数の導関数
も一般に
の関数である。そして、その関数をさらに
で微分しなければならない場合がある。(実際には非常に多くある。)
を
でもう一度微分したものをの二階微分とよび、、あるいは、またはと書く。の二階微分もまたの関数であり、さらにそれを
で微分する場合がある。このように
を
で次々と回微分したものを
<2-7> (2.1.3)
と書き、これを「の
階導関数、あるいは次の微係数」という。ただしは微分を実行しない、すなわち何もしないことを表すと約束しておく。
導関数を表す表し方が二通りあり、それが将来必要になるかもしれない「量子力学」の重要な概念である「演算」と密接に関係しているので、ここで少し寄り道をしてその話をしておく。(2.1.1)式での導関数をと書くと言ったが、それを
<2-8> (2.1.4)
の右辺のように書くこともある。同じ導関数に対する左辺(割り算型)と右辺(演算子型)の二つの書き表し方は、生じる結果が同じであっても、異なる意味を持っている。
| 関数 | 割り算型の導関数 | 演算子型の導関数 |
|---|---|---|
割り算型は(2.1.1)式による導関数の元々の定義式
<2-9> (2.1.5)
で、の極限を取る前の
と
の割り算に由来する書き方である。一方、演算子型の
は
との割り算の意味ではなく、それ全体で「微分演算子」と呼ばれる一つの記号を表し、「その右にある関数をで微分せよ」と我々に命じる記号である。だから、このを決してと
の二つに分解してはならない。「前後にある二つの数を足せ」と命じる演算子「+」を縦棒「|」と横棒「-」に切り離す人は誰もいないであろうが、それと同じことである。
「演算子」とはむずかさそうに聞こえるかもしれないが、実は上の「+」記号のように、小学校で算数の学習を始めてから我々は多くの演算子にすでに出合っている。たとえばの式に現われる記号の「」は演算子であって「記号の前にある量を後ろにある回数だけ加えよ」すなわち、「を回加えよ」という意味である。同様に「」も
「」も「」も全てと同じ演算子である。意味は全て分かるであろう。また(2.1.1)式のも「これに続く量のなかにあるを
とせよ」と命じる演算子である。現代物理学の基礎となる「量子力学」は全ての物理量をこのような数学的演算子と考えることから始まるが、ここでは演算子という言葉が持つ意味を知っただけにしておき、その物理的な内容には深入りしない。
の導関数が
「を微分した」演算の結果であることを強調するために、を
<2-10> (2.1.6)
と書くことが本書でもしばしばある。このときの、あるいはが微分演算子である。
「テイラーの定理」と呼ばれる非常に重要な数学定理がある。定理の証明は「解析学」に任せることにして、ここではそれを用いた関数
の「テイラー級数展開」及び「マクローリン級数展開」と呼ばれる、物理でとても頻繁に使われる有用な公式を与えておく。
関数の
次の導関数とその
における値
を使って、をのべき級数で表すことができる。その級数が「テイラー級数」である。具体的に書くと
<2-11> (2.2.1)
である。ここで、は からまでの自然数の連続した掛け算(「階乗」)、すなわち
<2-12>
を表す。たとえば、
、
、であり、が現れたときには
と約束する[2]。
はが大きくなると驚くほど急速に大きくなる。「熱力学」や「統計力学」では原子や分子の数に相当する
の階乗が現れ、その天文学的に大きな値が非常に重要な役割をはたすことになるので、に
から程度までの数値を与え、それがどのくらいの速さで大きくなるかを自分で確かめるとよい。
(2.2.1)式でをとした級数が「マクローリン級数」である。すなわち「マクローリン級数」は
<2-13> (2.2.2)
で与えられる。
テイラー級数やマクローリン級数が何の役に立つのか分からないかもしれないが、これらはかなり有用な数式であって、もしこれが使えなければ「理工学系」の学習や仕事に相当の不便を感じるに違いない。実は高校で暗記させられた数学公式のいくつかもこれに含まれている。以下に、マクローリン級数を使ってそれを示そう。
(2.2.2)式の右辺には多くの項があり面倒であると感じるかもしれない。しかし、もしがより小さければ、右辺の
はが大きくなると急速に小さくなる。たとえばであれば、、であり、の増加に連れてが急速に小さくなる。したがってのとき、もしを程度の精度で知るだけでよいなら、(2.2.2)式の最初の
項だけを考えて
<2-14> (2.2.3)
とすれば十分である。ここでを使った。
たとえばが
であるとしよう。そうするとであるから、、なので、(2.2.3)式は
<2-15> (2.2.4)
である。高校ではこの式を「二項定理の暗記すべき重要な近似式」として教えられたが、実はが小さい時に近似的に成り立つのマクローリン級数展開なのである。
以下で、上の例の他に物理でよく使う関数のマクローリン級数展開の最初の項を与えておく。これらのいくつかは実際に本シリーズの中で使うであろう。その時はここを参照してもらいたい。
| 関数 | マクローリン級数展開(項目までの近似) |
|---|---|
| <2-16> | <2-17> |
| <2-18> | <2-19> |
| <2-20> | <2-21> |
| <2-22> | <2-23> |
| <2-24> | <2-25> |
マクローリン級数展開が物理で非常に重要な役割を果たす例を一つあげておく。今は物理の内容を理解しようとしないで、そこでマクローリン展開がどのように使われているかを知るだけで良い。
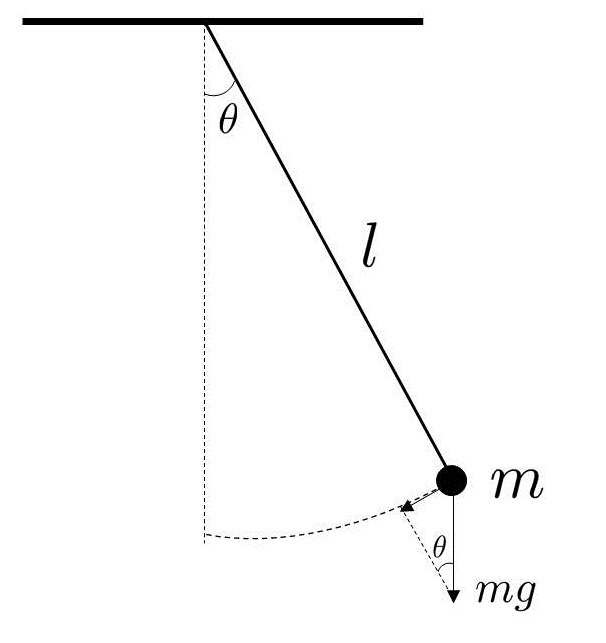
固定点から糸で吊るされ、重力の下で周期的な揺れを繰り返す物体を「振り子」または「振動子」という。以下の図(図2.2.1)は、質量
の物体を天井から長さの糸で吊るした振動子が運動している状態を示す図である。図の下に図の詳しい説明を与えてある。
以下に(図2.2.1)に描かれている図の内容を説明する。
【(図2.2.1)の説明】
図の上部に天井を表す短い線分が水平に描かれており、その線分の中間点(振動子の支点という)から線分に垂直下方に鉛直下方を示す点線が引かれている。支点から斜め右下に向けて振子を吊る糸を表す実線が描かれており、糸のなかほどの右横に糸の長さを表す文字
が記されている。糸と鉛直線の間にはその角度を表す小さな円弧が描かれており、その下に角度を表す文字が記されている。糸(実線)の先にはおもりを表す黒塗りされた小円が描かれ、その右におもりの質量を表す文字が記されている。おもりの位置と鉛直線の間にはおもりが運動する道筋を表す半径の円弧が点線で描かれている。おもりを表す黒円からはおもりに働く重力を示す矢印付きの短い実線が鉛直下方に描かれ、その先端右横に重力の大きさを表す文字
が記されている。
ここで、おもりがある点から、おもりが運動する道筋を表す円弧に沿って引いた接線を想定し、その接線に向かって重力を表す実線の先端から垂線を降ろしたと想像して欲しい。図にはその垂線が点線で描かれ、垂線と接線の交点まで矢印の付いた実線がおもりから接線上に描かれている。また点線で描かれた垂線とおもりに働く重力を表す矢印付き実線の間にはその角度を表す小さな円弧が描かれ、円弧の上に角度の大きさを表す
が記されている。
<2-26> (2.2.5)
である。今はこの方程式の物理的意味を気にせずに、それを単純にについての微分方程式と考えて、先に進むことにする。
(2.2.5)式は「非線型微分方程式」(「いろいろな微分方程式」の節で説明する)と呼ばれる方程式であり、そう簡単に解くことはできない。しかし、おもりの振れが小さく、したがってが小さければ、
【表】にあるの展開の一項目だけを考え(表では変数がなので、それを
に読み換えよ)、(2.2.5)式右辺の
を良い精度でで置き換えることができる。そうすると(2.2.5)式は
<2-27> (2.2.6)
となって方程式は「線型微分方程式」になり、簡単に解くことが出来る。の関数としてのを得るまでの手続きは本書の§8【練習1(単振動)】で与えるが、その結果は
<2-28> (2.2.7)
である。これは周期がの単振動の公式として高校の教科書に現れる重要な公式なので、きっと知っているに違いない。
このように、解くのが大変な(2.2.5)式のような方程式の解をマクローリン級数展開を利用することによって、近似的にではあるが求めることができる。このような例は少なくない。
高等学校の「物理」で、無限に続く級数を加えるとき、あるいは関数の中に含まれたある量が限りなく大きい(あるいは限りなく小さい)時の値を求めたり、または特定の値に近づけられた時の関数値を求めるときに、「極限」をとるという考え方を学び、それを
やのように書くことを知った。この教科書でも微分を定義したときに((2.1.1)式で)その書き方を用いた。物理学ではこの極限を取る操作がさまざまな状況で現れる。特に重要なのは次のような場合である。
我々が扱う物理系は、それが日常的な物体ならもちろん、たとえ素粒子のように小さくても必ず
でない大きさを持ち、宇宙のように大きくても決して
ではない有限な大きさを持つ。したがって、数学的な
やを考える必要がないと思うかもしれない。ところがでも
でもない大きさを考えながら物理系の性質を調べるのはとても大変かつ面倒なことで、時には扱うことすらできない場合もある。そこでよくやることは、小さなものに対してはその大きさが
であるとし、また大きなものに対してはその大きさが
であるとして物理系の性質を調べ、それを出発点に大きさを持つ影響を取り入れることがある。そのような時には、種々の数式が含む変数をとする極限や、
とする極限を考えることが必要になる。
ここでは物理学における極限操作に多く用いられる「ロピタルの定理」を学び、例題として物理学で実際に現れる幾つかの場合にそれを応用する。
【極限操作とロピタルの定理】 変数を持つ関数とに対し、は
<2-29> (2.3.1)
が成り立つ。ここでおよびである。「ロピタルの定理」および(2.3.1)式は、(2.2.1)式のテイラー級数展開を使えば次のように簡単に証明できる。
【ロピタルの定理の証明】 の
の極限を求めるのにロピタルの定理が必要となるのは
の時である。が
に十分近くなる時を考えるのであるから、そのような
に対してははとても小さく、それに比べるとはずっと小さく、
はさらに小さい。したがってテイラー級数展開を利用すれば、とを良い近似で
<2-30>
と書くことができる。がに近づけば近づくほどは小さくなり、はそれよりさらに小さくなる。たとえばなら、
なら
というように、が小さくなればなるほどはさらに小さくなる。したがって、の付近でやの一階微係数が極端に小さくなったり、二階微係数が極端に大きくなって、上式の右辺二項目が一項目に比べて必ずしも小さくない状況が生じれば別であるが、そうでなければ、上式の右辺二項目を無視することが出来る。
そのような場合には、もしかつならば、
の近くでとを非常によい精度で
<2-31>
と書くことができる。よって
<2-32>
となるので「ロピタルの定理」が成り立つ。
さらに、もしならばテイラー級数展開の次の次数を持つ項、すなわち
の二次の項が残り、さらにそれがならば次の項が残るので、それにしたがって次々に高次のべきで極限が与えられる定理が示される。
この定理を使う状況は物理学や数学の様々なところに現れる。いくつか例題を与えよう。
- 【例題1】最初の例は慎重な極限操作が要求される式として有名なのの極限
<2-33>
を求める。
- 【解】でこの式の分子も分母も
になるからロピタルの定理が使える。
かつ
であり、
であるから、
<2-34>
を得る。
- 【例題2】 を正の定数とするとき、
の関数
<2-35>
はの極限でどのように振る舞うかを調べる。
- 【解】 分母にある指数は
でとなり、は
になるので、与式の分母と分子は
の極限でともに
となる。したがってのの極限に対して「ロピタルの定理」を使うことができる。しかるに
<2-36>
であるから、「ロピタルの定理」を使って
<2-37>
を得る。(∵)
はるかかなたの宇宙から小天体が地球に向かって飛来することがある。それを観測し、進路を予想して、地球に危険が及ぶかどうかの判断をするのも物理学の役割の一つである。また、宇宙船を正確に制御して他の天体に送りこみ、また無事に地球に帰還させるのも物理学の役割である。これらを正確になしとげるためには、物体が進んで行く先の位置や速度を正確に知る必要がある。
物理学には独特の言葉使いがある。そのなかの一つに「物体の運動を求める」という言い方がある。その意味は「物体の位置と速度を時間の関数として表わす」ことである。もし「物体の位置と速度を時間の関数として表わす」ことができれば、「物体がこれまでどこにあって、どのような速度を持っていたか」また「物体がこれからどこに行き、どのような速度を持つか」を正確に言うことができるし、また「運動する物体の描く軌跡が正確にわかる」からである。これを可能にするのが、今から年前にニュートンが確立した「微分」と「積分」という数学手法である。
簡単のため、一つの直線上を運動する物体の位置を問題にしよう。その直線の名前を軸とし、適当に原点を決め、ある時刻における物体の位置を原点から測った距離
によって表すことにする。このとき、
軸が水平にあるとして、もし物体が原点から右方にあれば
は正、左方にあれば負であると約束する。このような物体の運動に関しニュートンが気がついたことは、
- 時刻におけるを直接知ることが出来なくても、もし「他の時刻における物体の位置」と「その時刻における
の導関数
」を知ることができれば「任意の時刻における物体の位置」を知ることができる。
- もし「ある時刻における位置と導関数」を知ることができなくても、「ある時刻における導関数」と「その時刻の導関数の導関数
」を知ることができれば「任意の時刻の導関数」を知ることができ、それから「任意の時刻の位置」を得ることができる。
- もし「ある時刻における導関数と導関数の導関数」を知ることができなくても、「ある時刻における導関数の導関数」と「その時刻の導関数の導関数の導関数」を知ることができれば、「任意の時刻の導関数の導関数」を知ることができ、それから「任意の時刻の導関数」を知ることができ、それから「任意の時刻の位置」を得ることができる。
- もし…。
これが数学者ニュートンが発見した微分と積分という数学を使った結論である。
しかし、これではどこまで行っても終わりがなく、結局何も分からないことになる。ところが数学者ニュートンは同時に物理学者でもあった。彼は任意の時刻における導関数の導関数
を得るためには
を知る必要はなく、自然を注意深く観察すると、それがを与えることに気がついた。それが何であるかを学ぶのは「物理学」で行うことにして、ここではもし自然を注意深く観察することによって
が得られたとして、それからどのようにして任意の時刻におけるを得るかという数学的手続き(積分)を学ぶことにする。
の導関数(微分係数)である
は、もしその値が変わらずある時間持続したとすれば、
にその時間をかけた量は物体がその間に移動する距離を与えるという意味を持つ。たとえば、もし
の大きさがあるから
秒間変わらずに持続したとすれば、物体は
秒後には今の位置から
だけ移動した位置にいることになる。この移動距離を時刻
における位置に加えると、から秒後に物体のある位置が正確にわかるのである。
しかし一般には時間とともに変わり、その大きさが長時間変わらずに持続することはなかなかないので、上の考え方によって
を簡単に知ることはできない。これを可能にする数学手法が「積分」である。その詳しい説明や結果を得る複雑な手続きは解析学で学ぶことにして、ここではそれを物理で使う目的のために、任意の時刻におけるを知って、それからを与える最終的な式だけを与えることにする。
- いま、時刻において物体が
にあったことが何らかの手段で観測され、それに加えて任意の時刻における物体の速度が分かったとする。そうすると、時刻における物体の位置は
<2-38> (2.4.1)
で与えられる。ここで右辺第二項は本書の第四章で学ぶ「の定積分」と呼ばれる量であり、の「不定積分」とよばれるの関数 が求められれば、 によって与えられる量である。(2.4.1)式の は、もし がよりも後の時刻()であれば物体が未来にある位置の予言値を与えるし、もしが よりも前の時刻 ()であれば物体が過去どこにあったかを確認することになる。(2.4.1)式に至る道筋は本章の「微分方程式」で、不定積分の計算は第四章で学ぶので、ここではこれが与えられたものとして話を進めることにする。
- と同様に、もしある時刻に物体がの速度を持っていたことが観測され、それに加え、何らかの手段で任意の時刻
におけるが分かったとする。そうすると任意の時刻で物体が持つ速度は
<2-39> (2.4.2)
で与えられる。もしが何らかの手段で得られ、(2.4.2)式からが得られれば、それを使って(2.4.1)式からを知ることができる。 であるから は と書くこともできることを注意しておく。
少し前に「ニュートンは自然を注意深く観測すれば、それがを与えることに気がついた」と書いた。したがって我々はもはやの三階以上の大きな階数の導関数を知る必要はなく、ニュートンにしたがって自然を注意深く観察してを知り、あとは(2.4.2)式から を知り、そして(2.4.1)式から を知ることができるのである。
[1] ここで使っている「微分」という言葉は「関数のわずかな増分」を表す数学用語であって、厳密には「差分」とよばれるべき量である。本当の「微分」はそれを限りなく小さくした極限であるが、計算機などを使った代数的な処理の際に使用するのは「差分」である。それを出来るだけ小さく与えることによって、数学で与える「微分」に近づけるのである。解析学的な議論をするのでなければ、ほとんどの場合はその違いを気にする必要はない。
[2] を式として理解しようとすると抵抗を感じるかもしれないが、それを証明するいくつかの方法がある。厳密な証明は面倒な関数を使うが、ここでは最も簡単なやり方でそれを示しておこう。階乗の定義がと書けることは理解できるであろう。これが で成り立つのであるから、 にその最も小さな値を代入してみる。そうするとであるから、であり、また明らかにであるから、故にであることが示せた。