「剛体」は基本的には原子または分子から構成される。物理では「剛体」を次のように説明する:
物体を構成する原子または分子が、物体がおかれた環境の下で互いの距離を常に一定に保つとき、その物体を「剛体」という。
上の定義にある「考えている環境の下で…」は「物体が置かれている周囲の温度や圧力の下で…」の意味である。もし剛体が特殊な環境(高温や高圧の状態)に置かれるとそれを構成する原子や分子の位置が微妙に変化し(すなわち剛体が変形し)、時にはそれらが全く乱雑な状態になってしまう(すなわち溶ける)こともある。以下では考えている環下で剛体は溶けも変形もしないとする。
剛体は分子以外の要素で作られていることもあるが、簡単のためここでは剛体を作っている要素を「分子」とよぶことにし、その大きさは考えない。剛体であるから分子と分子の距離は一定であり、それを数学的に表すことから始める。剛体を作っている分子の数を 個とし、空間に座標系を用意して原点を適当に定める。その原点に対する各分子の位置ベクトルをとする。そうすると「剛体内で分子と分子の距離は常に一定」の意味は、 をその一定の距離とすると、
<6-1> (6.1.1)
と表現される。剛体が運動しているときには、剛体を構成するどれか一つの分子の位置がわかればこの特性によって全ての分子の位置が原理的にわかる。剛体が運動するときには、剛体には大きさや形があるため、それがどこにあるかと同時に剛体の向く方向も指定しないといけない。このことを考えると、剛体の運動には次の二種類の運動形態があり、剛体の運動は一般的にこれらの組み合わせで行われることがわかる。
(1) 剛体が向きを変えずに、その質量中心が行う運動(「並進運動」)
(2) 質量中心が動かずに、剛体が一つの軸の周りに、したがって剛体の構成分子すべてが一つの軸の周りに回転する運動(「回転運動」)
質点の場合はこの(2)がなかったことに気がつかなければならない。ここで、前の章で与えた質量中心の定義(5.1.17)式を思い出そう。すなわち、剛体を構成する分子個の質量を、番目の分子の位置ベクトルを とすると、剛体を構成する分子が 個あるから、剛体の質量はであり、剛体の質量中心の位置ベクトル は
<6-2> (6.1.2)
である。剛体の一点に外部から力を加えるとその一点にある分子が動くが、剛体の全ての分子は互いの距離を一定に保とうと力を及ぼし合っているために、外部からの力がその分子を基点として他の分子に次々と伝わり、結局剛体全体が動くことになる。したがって剛体が動いているときには、少なくてもそのどこか一点に力が加えられていることになる。この力が作用する点を力の「作用点」という。作用点は一つの場合もあれば、たくさんある場合もある。多くの場合、作用点は剛体の表面にあるが、場合によっては剛体の内部にあってもよい。いま一つの力がどこか一点に加えられたとする。
作用点を通って、そこに加えられた力の方向に沿った直線を力の「作用線」という。このとき分子は互いの距離を変えないために
- 一つの作用線上に作用点を持つどのような力も、全て剛体の並進と回転に対し同じ効果を与える。
- 作用線が交わる複数の力をベクトル的に合成して(加えて)一つの力にすることができる。
- その逆に、一つの力を異なる作用線を持ついくつかの力に分解することもできる。
- 複数の力が剛体に加えられたとき、それらの作用線が一点で交われば、剛体は回転せずに並進運動をする。
- 複数の力が剛体に加えられたとき、交わらない作用線を持ち、大きさの異なる力が少なくても二つあれば、剛体は回転する。
空間に固定された一つの軸の周りに剛体が回転するとき、個の分子それぞれは回転軸に垂直な平面上で軸からの距離を半径とする円運動を行うが、そのなかで番目の分子を考える。このとき、回転の方向を表すのに、座標系の座標軸を定めるときに使った「右手の規則」と同様な規則を使う。
- 【回転方向に対する右手の規則】
- 親指を除く右手の本の指を剛体が回転する向きに巻いた時、親指が向いた方向を回転の方向と定義する。
<6-3> (6.2.1)
と表すことができる。したがって速度
<6-4> (6.2.2)
の成分は
<6-5> (6.2.3)
で与えられる。ここで、は分子が回転軸の周りを単位時間に回る角度を表す角速度である。剛体を構成する 個の分子どれも同じを持つことに注意せよ。の大きさ(速さ)は、(6.2.3)式を使って簡単な計算を行えば
<6-6> (6.2.4)
である。
(6.2.1)式、(6.2.2)式、(6.2.3)式を使うと、回転運動をする番目の分子の角運動量
<6-7>が
<6-8> (6.2.5)
となることがわかる。すなわち、番目の分子は
面上で円運動をするが、その角運動量はどの分子でも常に方向を向き、もし
が時間によらなければその大きさは時間によって変わらない。
剛体全体が持つ角運動量は分子が持つ(6.2.5式)の角運動量の和であるから、は
を構成要素全体にわたって加えた
<6-9> (6.2.6)
で与えられる。この右辺の和は剛体が与えられ、それを構成する分子の配置が分かり、剛体がどの軸を中心に回転するかが決まれば原理的に計算でき、剛体で決まった量である。この量を軸を回転軸とした剛体の「慣性モーメント」とよび、それをと書く。すなわち
<6-10> (6.2.7)
である。もう一度書くと、は剛体を構成する 番目の分子の回転軸(軸)からの距離である(軸からの距離であり、かつ回転半径でもある。慣性モーメントを使ってを表すと(6.2.6)式は
<6-11> (6.2.8)
となる。
ここで回転軸が軸であるとしたが、その正の向きがどちら側であるかはっきりしないので、それをの最初に与えた「右手の規則」によって決めることにする。すなわち、
右手の親指を立て、残りの本の指を剛体が回転する方向に回わしたとき
に立てた親指の方向が軸の正方向であると約束する。そしてあらためて、このように決めた方向を持つ軸を、回転する剛体の「回転軸」と呼ぶことにする。剛体の回転軸は剛体を回転させる外部要因によってのみ決まることを強調しておく。
(6.2.6)式と(6.2.8)式をまとめ、もう一度を書くと
<6-12> (6.2.9)
である。ここで、右辺にあるベクトルは大きさが回転の角速度であり、その方向が回転軸の正方向
(の正方向)であると定義されたベクトルである。
回転は剛体に加えられた外部からの力によって生じるが、どのような回転が生じるかは、どこを回転軸とするかによって決まる。ここでは剛体の質量中心((6.1.2)式)を通り適当な方向を向いた軸を回転軸とするような回転が生じたと考える。あらためてその回転軸を
軸とする座標系を設定する。そうすると(6.2.1)式から始まり(6.2.9)式にいたるまでの式はそのまま成り立つ。外力の作用点がちょうど番目の分子がある位置で、その位置ベクトルを、回転によって生じる運動量をとすれば、
と
は時間とともに変わるので
<6-13> も時間とともに変化する。その変化は
<6-14>
であるが、<6-15>であるので右辺第一項目は同じ方向を向くベクトルどうしの外積であるからになる[1]。そして第二項目のはニュートンの運動方程式から作用点にある番目の分子に働く力に等しい。したがって
<6-16> (6.2.10)
となる。この右辺のをトルクという[2]。
一方、(6.2.9)式の最後の式をで微分すれば、
は時間を含まないから、
<6-17>
となる。実際には番目以外の分子にも力が働いて剛体全体の回転を生じる。しかし 番目以外の分子に働く力は外部から与えた ではない。その力は分子の間に働く力、すなわち、 によって 番目の分子が動いた時、それにつれて変わろうとする分子間の距離を一定に保つよう働く、剛体内に存在する分子間の力である。外部から剛体に加えられた力はあくまでも番目の分子に働いて、それに運動量を与える力である。これと(6.2.10)式を組み合わせれば
<6-18> (6.2.11)
を得る。剛体に加えたトルクによる剛体の回転運動を表すこの基礎方程式を「オイラーの運動方程式」という。もし剛体にトルクが加えられていなければ、すなわち ならば、この方程式の解は
<6-19> (6.2.12)
を与え、剛体はまったく回転しないか、あるいは回転しても、一つの軸の周りに回転の速さも方向も変えずに、いつまでも回転を続ける
[3]。
剛体に作用点が異なるいくつかの力が働く場合を考える。もしいくつかの力が同じ作用線を持てば、§1で作用線について与えた注意1より、剛体の運動に関する限りそれらの力はすべて同じ力と考えてよい。ここではその注意5にある「作用線が交わらない(作用線が平行な)複数の力」が剛体に加えられた場合、すなわち剛体に複数のトルクが加えられた場合を考える。
いま剛体の点にの力が加えられたとする。その結果、それぞれの力からその作用点にある剛体の分子にはトルク
<6-20>が加わり、それによって回転が生じる。その回転による剛体の角運動量の時間変化は
<6-21> (6.2.13)
によって定まる。複数の力が作用する下で回転する剛体の回転運動はこの微分方程式を解いて決定されるが、問題によってはかなり複雑な微分方程式を解かなければならなくなる。それはこの段階における学習程度を越えるので、ここでは行わない。
この節のまとめとして、§6.1「剛体の運動学と力学」の要点を「トルク」という言葉を使ってもう一度述べておく。物体に複数の力が加えられたとき、
- 作用線が交わる複数の力をベクトル的に合成し(加え)一つの力として表すことができる。
- もし加えられた力の作用線が交われば、剛体は複数の力を合成した一つの力によって並進運動をする。
- 交わらない作用線を持つ力が加えられた剛体はそれらのトルクの和がでなければ回転する。
前節で、剛体が回転するときの回転運動の様子を与える「オイラーの運動方程式」((6.2.11)式)を与えた。「オイラーの運動方程式」は剛体の回転が剛体に固有な慣性モーメント((6.2.7)式)と剛体に作用するトルクによって支配されることを示している。すなわち、回転している剛体は、もしそれにトルクが働いていなければ角速度を一定に保ったまま回転を続け、もしそれにトルクが作用していれば剛体は角速度を変えながら(すなわち回転の速さを変えながら)回転を続ける。角速度が大きくなれば剛体の回転は速くなり、角速度が小さくなれば剛体の回転は遅くなる。トルクの作用によって角速度がどの程度変わるかは慣性モーメントの大きさによる。同じトルクが作用しても、慣性モーメントが小さければ角速度は変わりやすく、慣性モーメントが大きければ角速度は変わりにくい。その意味で「オイラーの運動方程式」と並進運動の様子を与える「ニュートンの運動方程式」が似ていることに気がつくであろう。「ニュートンの運動方程式」で物体の動きやすさを決めるのは質量であったが、剛体の回転では質量の役目を慣性モーメントが行い、その回転のし易さを決めているのである。
「オイラーの運動方程式」を解いて回転運動を実際に知ろうとすれば、まず回転軸を定め、その軸の回りの慣性モーメントを計算しないといけない。しかし、回転軸をどこにするかによっては慣性モーメントの計算がとてもやっかいになることがある。たとえばフリスビー(フライングディスク)と呼ばれる円盤型(皿型)形状をしたプラスティック遊具がある[4]。指を皿の内側にかけて、それを軸にフリスビーをグルグルと回転させる。その回転運動の様子も「オイラーの運動方程式」を解くことで知ることができる。そのとき最初に行うことは指をかける軸の周りのフリスビーの慣性モーメントを求めることである。
しかしながら、任意の軸を回転軸にする剛体の慣性モーメントを求めることはそれほど簡単でない。ところがそれをある程度容易に実行させる方法がある。質量中心を通る軸の回りの慣性モーメントを計算することは比較的簡単であり、それを利用した「平行軸の定理」と、「直交軸の定理」と呼ばれる定理を使うのである。この節ではその二つの定理を学ぶ。この下に定理の説明に用いる二つの剛体板の図を与える。
図では異なる形状を持つ二つの剛体板が左右に並んで二種類与えられ、それぞれに対して剛体板を眺める方向を変えた二つの図が上下に描かれている。したがって以下には左右上下に四個の図が与えられていることになる。異なる形状を持つ剛体板を表す二種類の図は、左(図6.1)の上下二つが「平行軸の定理」の説明に使われ、右(図6.2)の上下二つが「直交軸の定理」の説明に使われる。それぞれの上の図は剛体板を上から眺めた図で、下の図は真横から眺めた図である。図の下にその詳細な説明を与えてある。いずれの剛体もごく薄い厚さの平板で、不規則な形状の周を持っている。そして板は板面に垂直な軸の回りに回転すると考える。
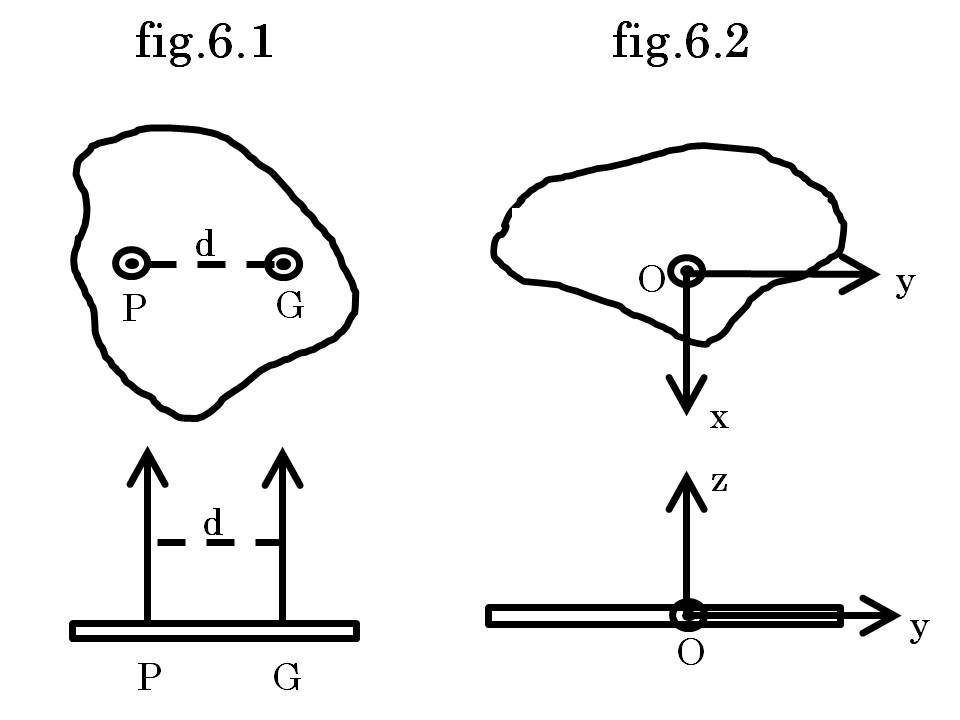
【図6.1(左側にある上下二つの図)】
上の図は剛体板を真上から見た図、下の図は真横から見た図である。上の図には剛体板面に垂直な回転軸を表す丸マークが二ヵ所描かれている。回転軸の一つは面の左側に描かれており、もう一つ
は剛体板の質量中心を表し、ここでは板の比較的右側に描かれている。もちろん、実際に板が回転するときは、どちらか一方を軸に回転する。丸マークの中心には、回転軸の正方向が紙面からこちらに向かうことを表す点が打ってある。回転の方向は「右手の規則」にしたがって決められるので、ここでは板はこちらから見て左回りに回転すると考えている。下の図は板を紙面のこちらから(横から)見た様子を表している。剛体板は厚みを持つので、横から剛体板を見た図は長方形になる。上の図にある二種類の回転軸
と)が軸の正方向を表す上向き矢印を持った垂直線で描かれている。
【図6.2(右側にある上下二つの図)】
ここに描かれた剛体板は左側の図で描かれた剛体板と異なる形状を持つ。上の図はそれを真上から見た図、下の図はそれを真横から見た図である。上の図にある剛体板のの上には板面に垂直な回転軸(軸)が通る点
が丸印で示されている。丸印の中心には
軸が紙面からこちらに向かうことを表す点が打たれている。紙面上(したがって板面上)にを原点として軸(回転軸)と直交した軸を表す直線が紙面下方に、
軸を表す直線が点から右に向かって水平に描かれている。点で直交する二つの直線の先端につけられた矢印は、「右手系の規則(互いに直角に開いた親指、人差し指、中指の順に、軸、軸、軸の方向を表す)」にしたがって与えられた軸と
軸の正方向を表している。下の図は上の図で描かれた剛体板を
軸の正方向(すなわち紙面の下)から見た図である。剛体板は厚みを持つので、下の図は長方形になる。その長方形の点から紙面上向きに
軸、から紙面右方向に軸、から手前に軸が描かれている。
軸が紙面から手前に向かっていることを示すために、中心に点を打った丸印が
点に描かれている。
以下で、順に、「平行軸の定理」と「直交軸の定理」を与える。
【平行軸の定理(図6.1)】
剛体の質量を、考えている点を通る軸の回りの慣性モーメントを
、その点と質量中心(図6.1の点)の距離を、考えている回転軸に平行な質量中心を通る軸の周りの慣性モーメントをとすると、
は
<6-22> (6.3.1)
で与えられる。これを「平行軸の定理」という。証明は行わないが、それほど難しくないので自ら試みてほしい。
一様な球形の剛体の場合は、その質量中心は明らかに球の中心にあり、そこを通る互いに直交する軸を持つ任意の座標系はどれも同等である。したがって球の中心を通る任意の軸を軸とし、それに直交する二つの軸を「右手系の規則」にしたがって軸と軸とすれば、球には空間的な異方性がないのでそれらの
軸それぞれを回転軸とする三つの慣性モーメント
が等しいことは直感的に理解できるであろう(数学的にも容易に証明できる)。また回転楕円体(ラグビーボール)の形を持つ剛体については、その質量中心を通る長軸(あるいは短軸の一つ)を
軸とし、それに直交する二つの短軸(あるいは短軸と長軸)を「右手系の規則」にしたがって軸と軸とすると、軸に垂直な面(面)は円であるから、軸と軸を回転軸とする二つの慣性モーメントは等しい。
平行軸の定理の他に、これも証明は省くが、もう一つ「直交軸の定理」とよばれる慣性モーメントに対してよく使われる定理があるので、それを与えておく。
【直交軸の定理】
直交軸の定理を図6.2にある平板剛体を使って説明する。剛体版の質量をとして板上のどこかに板面に垂直に軸をとり、「右手系の規則」にしたがってそれに直交する
軸と軸を板上に設定する。このとき、軸、軸、軸の周りの慣性モーメントをそれぞれ
、、とすると、それらの間に
<6-23> (6.3.2)
の関係が成り立つ。これを「直交軸の定理」という。
ここでは実例を与えないが、「平行軸の定理」と「直交軸の定理」をうまく組み合わせることによって複雑な剛体の慣性モーメントの得られることがしばしばあるので、このような定理があることを知っておくとよい。
前節で「ニュートンの運動方程式」と「オイラーの運動方程式」の類似性を指摘し、それらに含まれる質量と慣性モーメントの意味について述べた。重要なことなので、その点をもう一度繰り返しておく。
「ニュートンの運動方程式」は物体に力を加えたとき物体の速度がどれだけ変わるかを示す方程式である。同じ力を物体に加えたとき質量が大きいほど速度変化は小さくなるので、その物体は動かしにくいことが運動方程式からわかる。つまり質量は物体の動きやすさを表す量である。同じように、「オイラーの運動方程式」((6.2.12)式)は剛体にトルクを加えたとき剛体の回転速度がどのくらい変わるかを示す方程式である。同じトルクを加えたとき、剛体の慣性モーメントが大きいほど回転速度の変化は小さくなるので剛体は回転しにくいことがわかる。つまり慣性モーメントは剛体の回転しやすさを表す量である。
慣性モーメントを定義する(6.2.10)式から分かるように、二つの剛体が同じ質量であっても、その質量がどのように配置されて剛体を作っているかによって慣性モーメントは異なり、したがって回転のし易さも異なる。また一つの剛体でも、剛体のどこを軸として回転するかによって慣性モーメントが異なり、したがって回転のし易さも異なる。言いかえれば、日常的に経験するように、剛体には回転させ易い軸と回転させにくい軸がある。この節では同じ質量を持つが異なる形状を持ついくつかの剛体に対し具体的に慣性モーメントを計算する。
【ダンベル型剛体と剛体棒】
二つの重い鉄球を鉄棒でつないだダンベルという筋力トレーニングに使う器具がある。その慣性モーメントが計算できるようにそれを簡単化した剛体の慣性モーメントを求め、そのやり方を使って一様な剛体棒の慣性モーメントを求める。以下の図6.3にダンベル型剛体と剛体棒を模型的に表わした二つの図を与えてある。上には【ダンベル型剛体】の図が、下には【剛体棒】の図が描かれている。
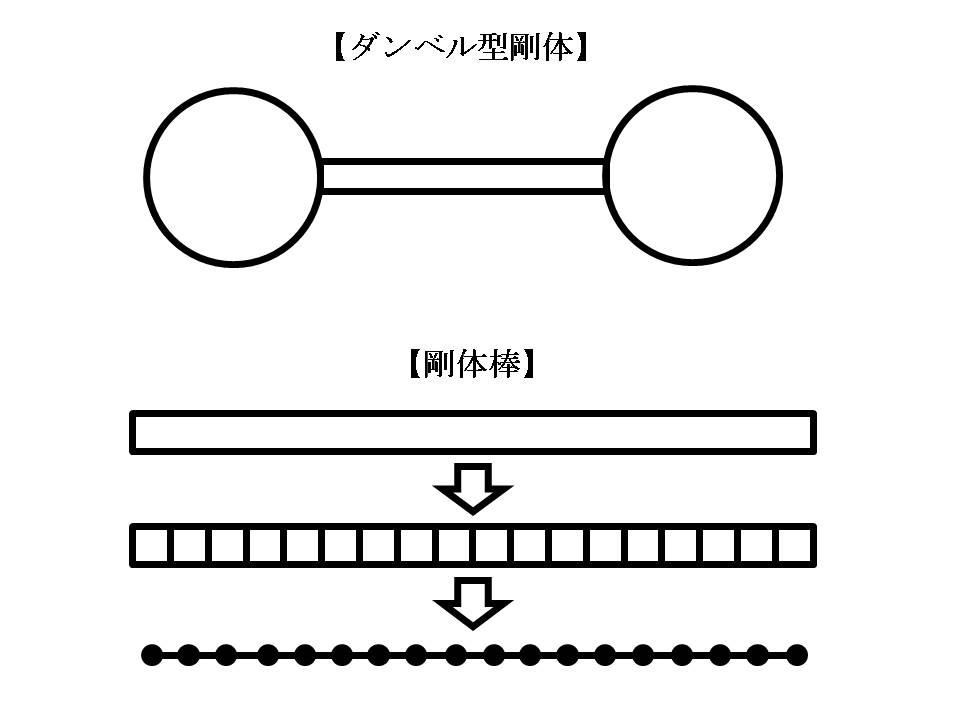
【図6.3上段のダンベル型剛体の図】
図の左右に鉄球を表す二つの円が描かれており、その間に描かれた水平の細長い長方形が二つの円をつないでいる。細長い長方形は鉄球をつなぐ鉄棒を表わしている。
【図6.3下段の剛体棒の図】
ここでは三つの図がさらに上下三段に描かれている。一段目は剛体棒を表す細長い長方形が水平に描かれている。そこから下を向いた矢印で示された二段目には一段目の長方形を縦線で個の小さな矩形に区切った図が描かれており、そこから下を向いた矢印で示された三段目には小さな矩形を一つづつ、小さな丸で置き換え、その小さな丸を細い線分で一つづつつないだ図が描かれている。ダンベル型剛体の鉄球を表す円が数多く横につながった様子を想像するとよい。
最初に、上段に描かれたダンベル型剛体を異なる二つの軸の回りに回転するとして、その軸の回りの慣性モーメントを求める。二つの回転として
- 一方の鉄球を軸にして、水平にダンベルを回転する
- 二つの鉄球をつなぐ鉄棒の中心を軸にして、水平にダンベルを回転する
まず、一方の鉄球を軸としてダンベルを水平に回転させる場合の慣性モーメントを求める。回転軸となる位置にある鉄球の回転軸からの距離はであるから、その鉄球は慣性モーメントに寄与しない((6.2.7)式で)。もう一方の鉄球は回転軸からの距離にあるから、結局は(6.2.7)式より
<6-24> (6.4.1)
となる。
次に、鉄棒の中間点を回転軸としてこのダンベルを水平に回転させるときの慣性モーメントを求める。それぞれが質量の二つの鉄球はそれぞれ回転軸からの距離にあるので、(6.2.7)式よりは
<6-25> (6.4.2)
となる。
このを求めるのに「平行軸の定理」を利用することもできる。鉄棒の中間点は明らかにダンベルの質量中心であるから、求めようとしているは質量中心を軸に剛体を回転させるときの慣性モーメント((6.3.1)式の)である。(6.3.1)式にあるが先に求めたであるとすれば、「平行な回転軸間の距離
」がであるので、(6.3.1)式でとして
を求めれば
<6-26> (6.4.3)
となり、(6.4.2)式と同じ結論が得られる。
このようにであるから、同じダンベルであっても、鉄球を軸に回転させるよりも鉄棒の中点を軸に回転させる方が楽にダンベルは回転することがわかる。これが正しいことは経験からも理解できるであろう。
ダンベルの慣性モーメントがわかれば、それを利用して真っすぐな剛体棒の慣性モーメントを次のようにして求めることができる。図6.3のダンベル型剛体図の下に剛体棒の模型図が順に三種描かれている。一段目には剛体棒が一本の細長い長方形で水平に描かれており、
二段目には その長方形が連続した小さな矩形に分けられた図が描かれており
、三段目には全ての矩形を小球で置き換え、それらを細い棒でつないだ図が描かれている。
剛体棒の質量を、長さをとする。その剛体棒を6.3図【剛体棒】二段目にある図のように等分する。そうすると、各断片の質量はである。そこで一つの断片を質量
の大きさが無視できる小球に置き換えて、三段目の図のように
ごとに質量が無視できる細い剛体の線で水平につなぐ。もしが十分大きくなれば、この不連続な質量の並びは元の剛体棒にもどる。
ダンベルで行ったように、この棒を一つの端を軸として回転させたときの慣性モーメントをとすると、回転軸に最も近い質量は回転軸から
の位置にあり、次の質量はの位置にあり、次の質量は
の位置にあり、最も遠い質量は回転軸からの位置にある。したがって(6.2.7)式より
は
<6-27> (6.4.4)
となる。ここで最後の式を得るため、整数の二乗和の公式
<6-28> (6.4.5)
をとして用い、同時に をで置き換えた。(6.4.4)式最後の式の分母と分子を で割り算すると(6.4.4)式は
<6-29>
と書き換えられ、分割数を十分大きくすると はその前の整数 に比べて無視できるくらい小さくなるから、は最終的に
<6-30> (6.4.6)
となる。
次に同じ剛体棒をその中間点を軸として回転させるときの慣性モーメントを求める。と同じように長さ
の剛体棒を等分して、質量を中間点から左右両側へ距離が、
、、…、の位置に置く。そうすると(6.2.7)式よりは
<6-31> (6.4.7)
となる。右辺のは 左右同じ量があるので、それを加えたことから生じる。 を得たときと同じ手続きを行って、最終的に
<6-32> (6.4.8)
を得る。ダンベルと同じように、このときにも「平行軸の定理」を使ってを求めることができる。すなわち、棒の一端を軸に回転させるときの回転軸と、棒の中間点を軸として回転させるときの回転軸の距離がであるから、 との間に
<6-33> (6.4.9)
の関係がある。(6.4.6)式からなので
<6-34> (6.4.10)
と、(6.4.8)式と同じ結果を得る。
剛体棒の場合もダンベルと同じようにであるから、
棒の端を軸に回転させるよりも中間点を軸に回転させる方が、棒は簡単に回転することが分かる。
【その他の剛体】
剛体棒で行ったように他の剛体の場合もそれを小さな部分に分割し、小部分の配置を考えて(6.2.7)式を使い、その慣性モーメントを求めることができる。前節までの結果も含め、そのようにして求められた典型的な剛体の慣性モーメントを以下の表に与えておく。剛体が同じ形状を持っていても、どこを回転軸とするかによって慣性モーメントが異なることに注意せよ。
| 剛体の形状 | 回転軸 | 慣性モーメント |
|---|---|---|
| 質量で長さの棒 | 棒の中間点 | <6-35> |
| 質量で長さの棒 | 一方の端 | <6-36> |
| 質量の鉄球個を持つ長さ のダンベル |
一方の鉄球 | <6-37> |
| 質量の鉄球個を持つ長さ のダンベル |
球の中間点 | <6-38> |
| 辺が、 質量の長方形板 | の中点を通りに平行な軸 | <6-39> |
| 辺が、質量 の長方形板 | 質量中心を通り板に垂直な軸 | <6-40> |
| 質量、半径の円板 | 直径 | <6-41> |
| 質量、半径の円板 | 板に垂直な中心軸 | <6-42> |
| 質量、半径の球 | 中心を通る軸 | <6-43> |
| 質量、半径、高さの円柱 | 円の直径に平行で高さの軸 | <6-44> |
| 質量、半径、高さの円柱 | 円に垂直で中心を通る軸 | <6-45> |
剛体に力を加えると、一般に剛体は「ニュートンの運動方程式」によって記述される並進運動と「オイラーの方程式」によって記述される回転運動が複雑に組み合わさった運動をする。その典型的な例はコマが回転しながら移動する運動や地球の歳差運動であり、それらの振る舞いは物理的にも数学的にもなかなか面白い。しかしながらその解析には高度な代数的処理が必要になる。また、我々の周りにある物体や、機械工学や建築工学の世界で扱う物体はとても複雑な形状を持つために、慣性モーメントを代数的に求めその運動を分析することは難しい。それには電子計算機を用いた解析が必要になる。したがって、ここではそれらの運動の学習にこれ以上立ち入らない。
[1] 二つのベクトルから作られる外積の大きさは二つのベクトルが作る角の正弦(サイン)に比例することを思い出そう。そうすると、同じ方向を向くベクトルが作る角はであるから、それらの外積の大きさはとなることが理解出来るであろう。
[2] トルク(torque)は「回転させる力(回転力)」を意味する英語であるが、すでに日本語化して使われているので訳さずにそのまま使うことにする。「トルク」を理解するのに自転車が一番良い。自転車のペダルの回転はギアで車輪の回転に変えられるが、ペダルを回すために足でペダルを踏み、ペダルを回転させる力がトルクである。
[3] 「ニュートンの運動方程式」は物体の並進運動を定めるが、運動方程式はもし物体に働く力がなければ物体は速度を変えずに運動を続けるという「慣性の法則」を内包する。一方「オイラーの運動方程式」は剛体の回転運動を定めるが、それに働くトルクがなければ剛体は角速度を変えず回転を続ける運動の形態を内包する。
[4] フリスビーはお盆のように、外側(凸面部)と内側(凹面部)を持つ 形をした直径が30cmくらいのプラスティックでできた製遊具である。凹面部を下にして高速で回転させながら前に放ると、凹面部が抱え込んだ空気のため凹面部分の空気圧が凸面部より高くなり、それで生じる揚力がフリスビーを押し上げて、それを長時間落下させることなく遠くまで飛行させ、離れた二人がフリスビーをやり取りすることができる。